Unfortunately, our build blog had to take low priority due to student availability, especially since most of our build blog writers are CAD students. Over the next few days, we’ll briefly recap our process up until now as we get ready to reveal our 2025 robot design!
Kickoff: Game Strategy
When REEFSCAPE released, we had a pretty standard kickoff. We read through the entire game manual as a team and had every student pass the 1678 rules test.
We try to keep our team’s strategy discussion as structured as possible to expedite the build process. After Kickoff Day 1, our design team started sketching out what the robot could be.
By the end of the first day, we made it imperative to produce a first go at a MoSCoW table.
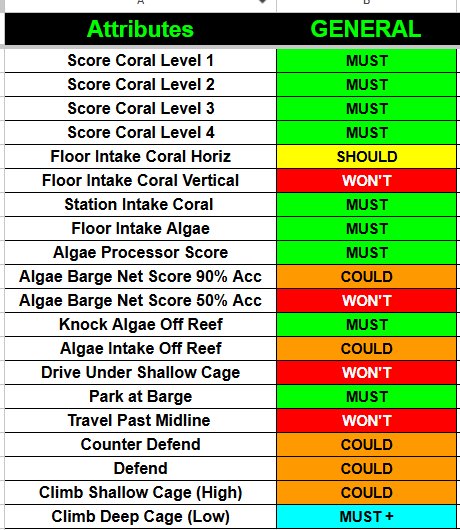
MoSCoW (Must/Should/Could/Won’t) is essentially a tabling system that our team uses to choose what attributes of the game we want to prioritize. Here are some of the important ones from the table:
- Score L1-L4 Coral: Must
- Floor Intake Coral: Should/Won’t
- Station Intake Coral: Must
- Algae Intaking (Floor): Must
- De-Algae-ifying Reef: Must
- Algae Processor Score: Must
- Algae Net Score: Could
- Climb Deep Cage: Must+
We elected to “Must+” the Deep Cage, because in order to get the Barge RP, you need a minimum of 1 Deep Cage climb and 1 park, or 2 Shallow Cage climbs and 1 park. We want to be as independent of a contender as possible when it comes to scoring the RP, and Deep Cage Climb does just that for our robot.
Most of our prototyping and base designing was built around this deep cage, since it took priority. No matter what our robot was, we wanted to be able to climb the deep cage.