Most of our first week involved the use of a tool in Onshape called KrayonCAD for our ideation.
KrayonCAD is an Onshape parts library designed for quickly blocking out robot designs. We use this for quickly prototyping and bringing our ultra-simplified ideas to life.
Below are some of the designs that we made in KrayonCAD:


After we give our design team adequate time to run their faucets dry of ideas, we run the main KrayonCAD designs through a Pugh Matrix.
A Pugh Matrix is a type of matrix diagram that lets us compare design candidates. The criteria we use is based on our MoSCoW from earlier. Each row is weighted based on relative priority, and each design is ranked 0,1, or 2 based on how well it performs each task.
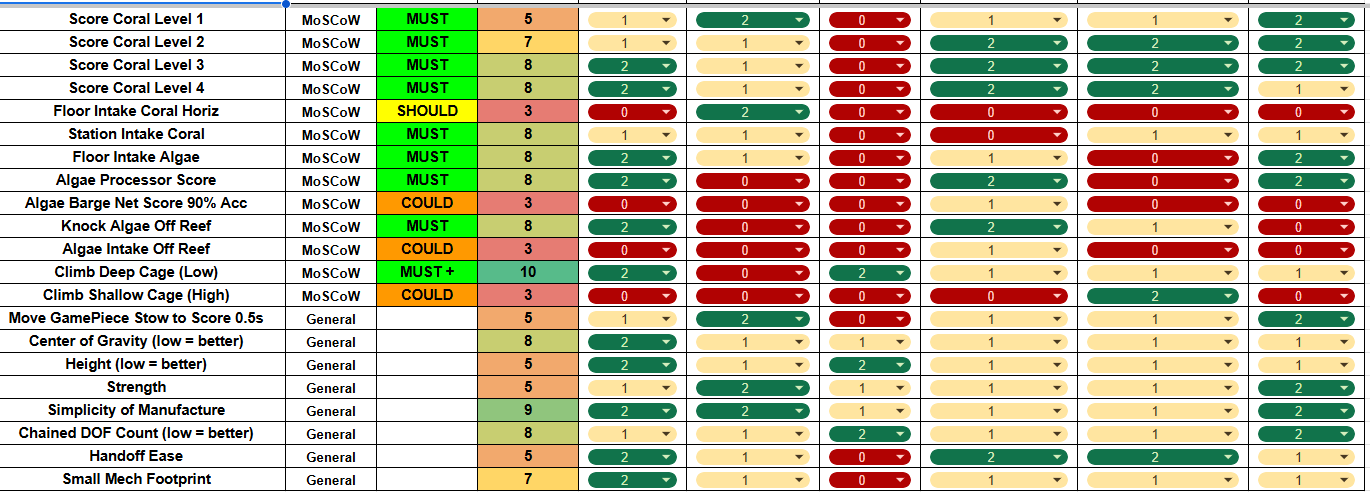
As we mentioned before kickoff, we place a high priority on software controllability. Instead of a direct veto, this factor was rolled into Chained DOF Count and Handoff Ease.
One factor that was discussed but treated more subjectively is how similar some designs were to our 2023 robot, or other 2023 robots we had studied. This is important because although the software for our 2023 robot was somewhat complicated, they are now a solved problem and we can be more confident about our simulation and control system setup
The scores are added in this summary table that gives each design a final superscore.

There is a clear favorite here, and the CAD team got right to work with the details.